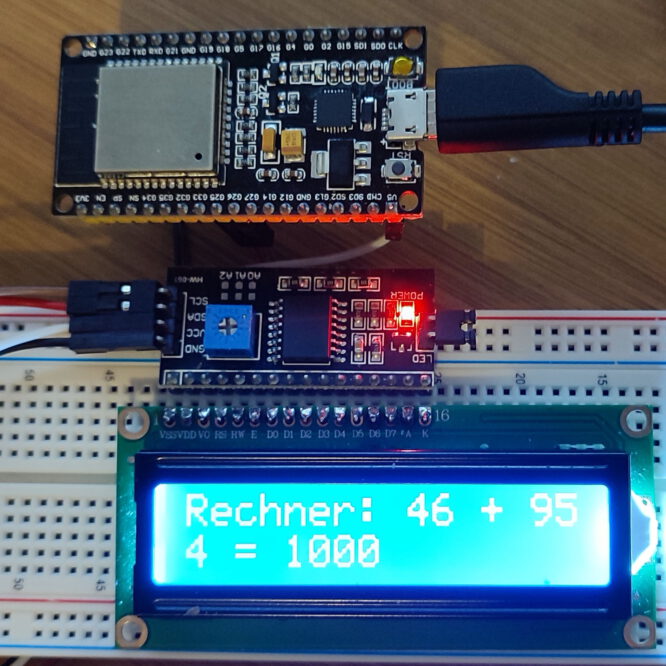
C3PO – ESP32 Display
Da der C3PO Roboter noch etwas Platz auf dem Dach hat, soll er eine Displayanzeige erhalten. Eine geeignet Bibliothek zur
Roboter und 3D Druck

Da der C3PO Roboter noch etwas Platz auf dem Dach hat, soll er eine Displayanzeige erhalten. Eine geeignet Bibliothek zur
Den kürzlich begonnenen Webserver, der alle Werte der GPIO Pins in einem einstellbaren Intervall abfragt und dann per REST Schnittstelle
Tipp: Eine while Schleife von MicroPython kann aktuell auf dem Pico nicht zuverlässig durch den KeyboardInterrupt (CTRL+C) unterbrochen werden. Dies
Unter Windows 10 (11) entwickle ich per SSH Remote Konsole auf dem Raspberry PI mit Visual Studio Code. Hier benötige
Robot Operating System, kurz ROS, ist ein Framework, um den Herausforderungen, die sich Entwicklern bei der Erstellung von Roboter-Anwendungen stellen,
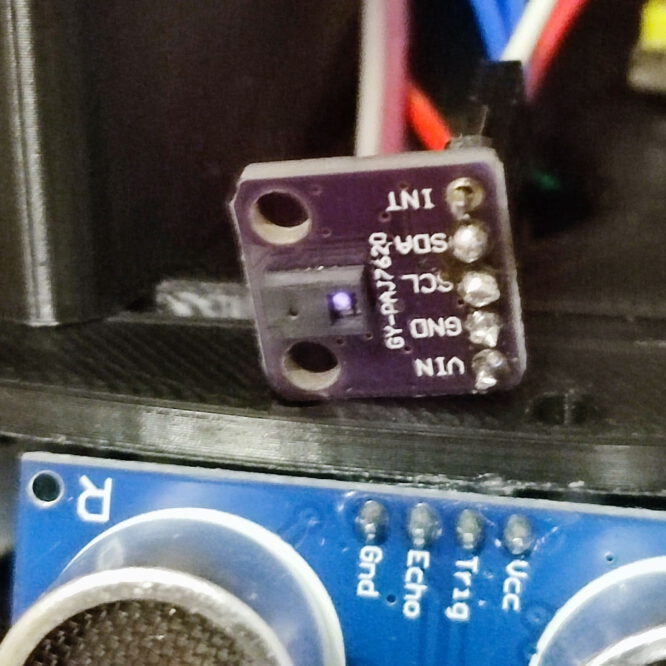
Ein kleiner Zwischenstopp während der Einarbeitung in ROS: Ich hatte mir vor ein paar Monaten das Gestenerkennungsmodul PAJ7620U2 bei der
Natürlich muss das Automatische Programm für die Fahrzeugsteuerung zum Autonomen Fahren des Roboters auch für die Vier-Rad Steuerung laufen. Wie
Nach der Einrichtung des ESP32 und dem Sammeln erster Erfahrungen, will ich einen Versuch starten die Sensordaten des ESP32 per

Tipp: Wenn man unter Ubuntu 20.04 den Fehler: „No access to /dev/mem“ beim Schreiben auf die GPIO Pins bekommt, liegt
R2D2 soll per Bluetooth mit dem Smartphone gesteuert werden können und zusätzlich sollen die Autonomen Fahrprogramme mit dem Smartphone gestartet
weiterlesenR2D2 – serielle Konsole deaktivieren auf dem Raspberry Pi unter Ubuntu